Die RosCon 2015 in Hamburg war für mich das erste mal, daß ich in dieser Community unterwegs war.

Ros versucht ein Framework für die Steuerung von Robotern zu sein und ist das viel versprechenste was ich in dieser Richtung bis jetzt gesehen habe. Das liegt zum Einen an der Community, die im Wesentlichen aus den Top Uni’s der Welt besteht, zum Anderen an den Firmen, die das bereits einsetzen. Darunter solche Firmen wie Willow Garage, Bosh, BMW und diverse Startups. Es gibt auch einen Ableger, der sich nur um Industrieroboter kümmert. Firmen suchen händeringend in der Richtung Experten…leider zur Zeit noch meist nur im Silicon Valley.
Hier nun ein paar Eindrücke von der Veranstaltung, die durch die Vortragsserie, den „Lightning Talks“ (Kurz Vorträge) und „Birds and Feather Sessions“ (Zusammenkommen Gleichgesinnter) gestaltet hat. Man sieht schon, es wurde sich fast nur in englisch unterhalten.
Die Veranstaltung hat sich in der Hamburger Uni eingemietet, so konnte der große Saal der Geisteswissenschaften genutzt werden.

Die Veranstaltung hat ein paar nette Sponsoren angezogen. So hat NVIDIA das erste Mittagessen bezahlt. Sick (Ein Laserscanner Hersteller) das Zweite. Canonical und Erle Robotics haben einiges hinzu gesteuert. Mark Shuttelworth war höchst persöhnlich zwei Tage da und hat sich löchern lassen und einen netten Vortrag gegeben.
Ein paar wenige Nerds waren auch da.
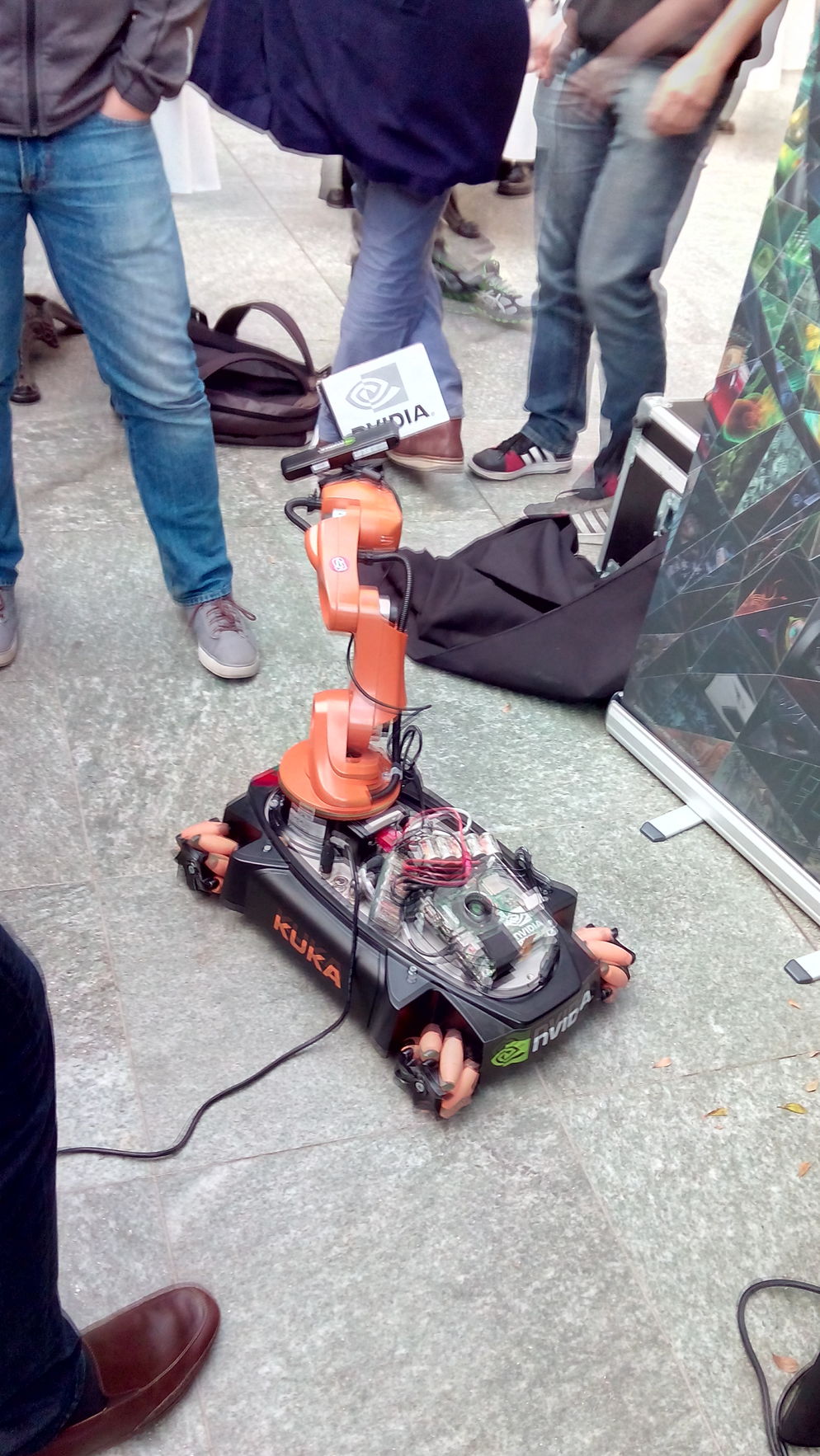
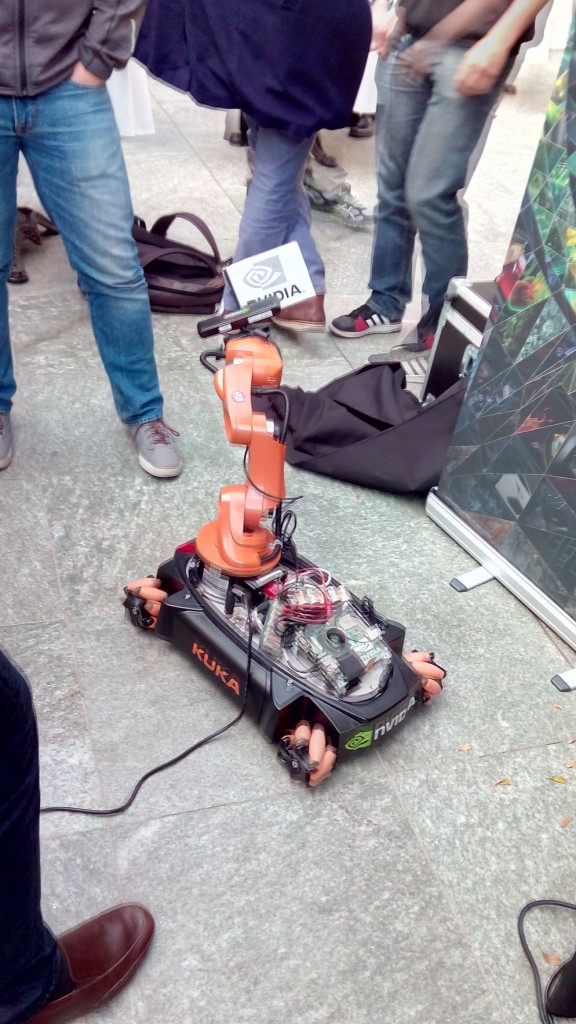
Neben den Vorträgen hatten diverse Firmen ihre Stände in der Pausenhalle. Hier eine Kooperation aus NVIDIA und KUKA
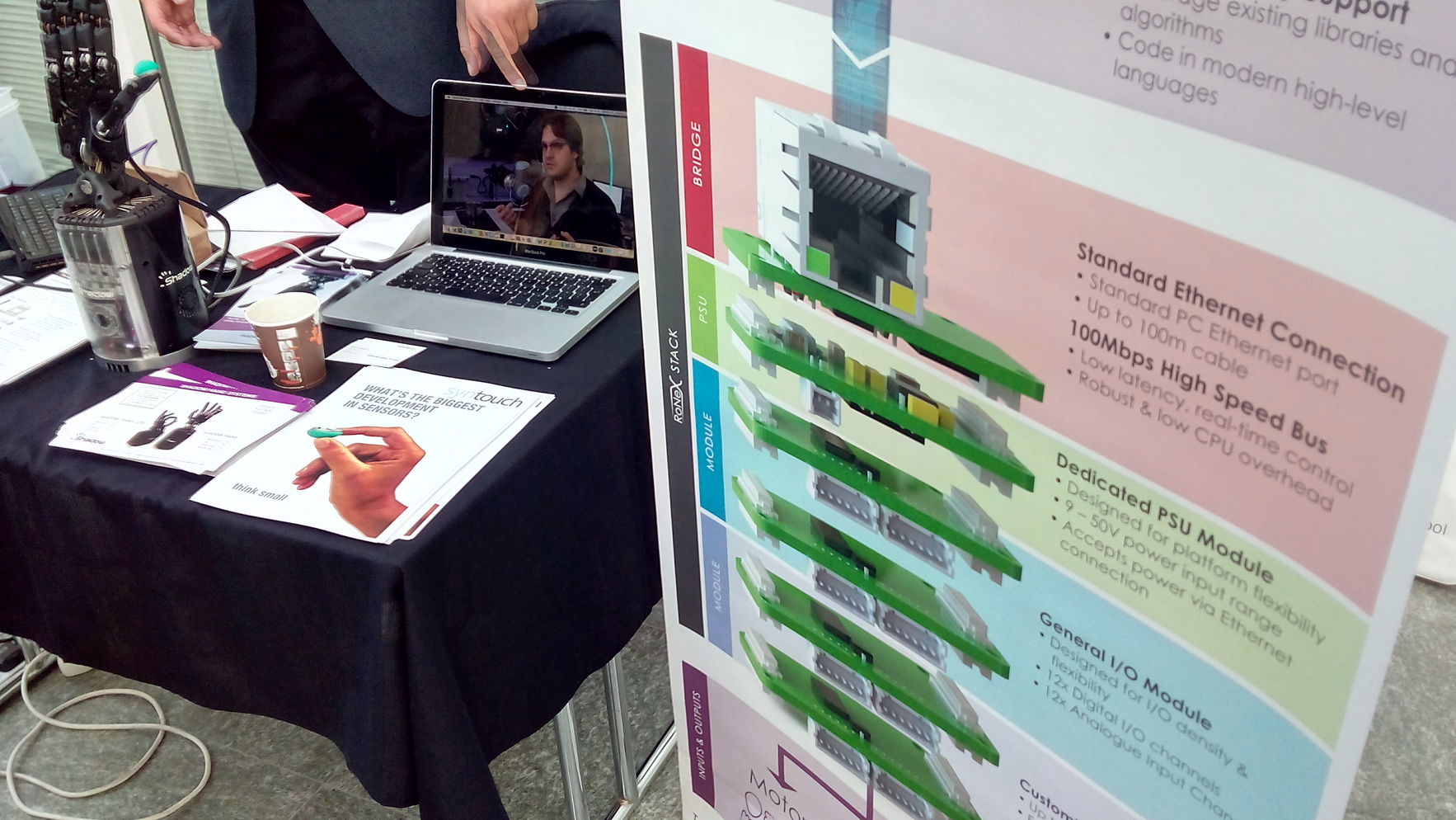
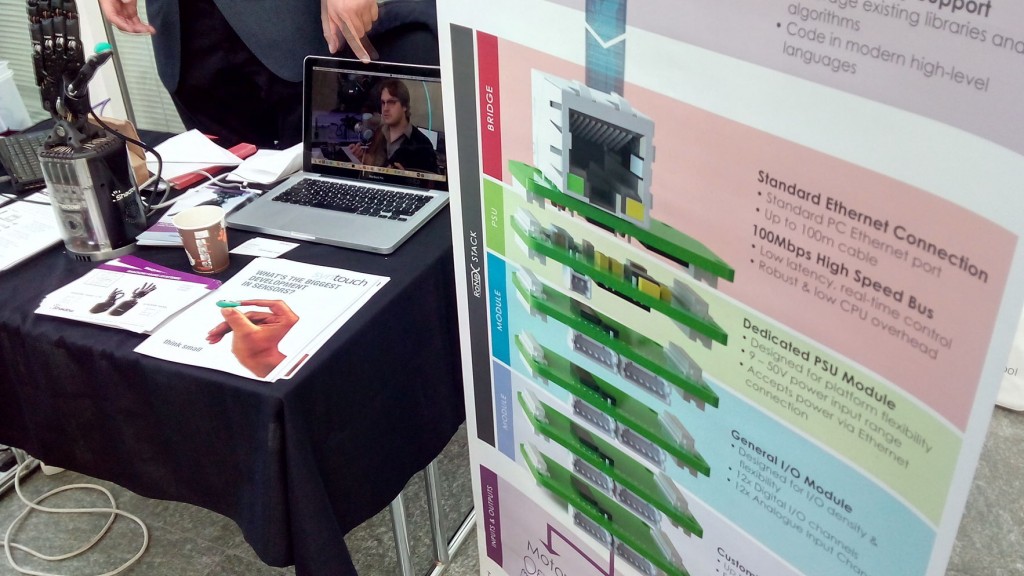
Hier haben Bosch und eine Firma aus München ihren Stand.

Ein paar Asiatische Firmen waren auch da….sehr niedlich 🙂

Hier ein paar weitere interessante Firmen:

Dieser Bot kann mit Menschen zusammen arbeiten ohne sie zu verletzen..


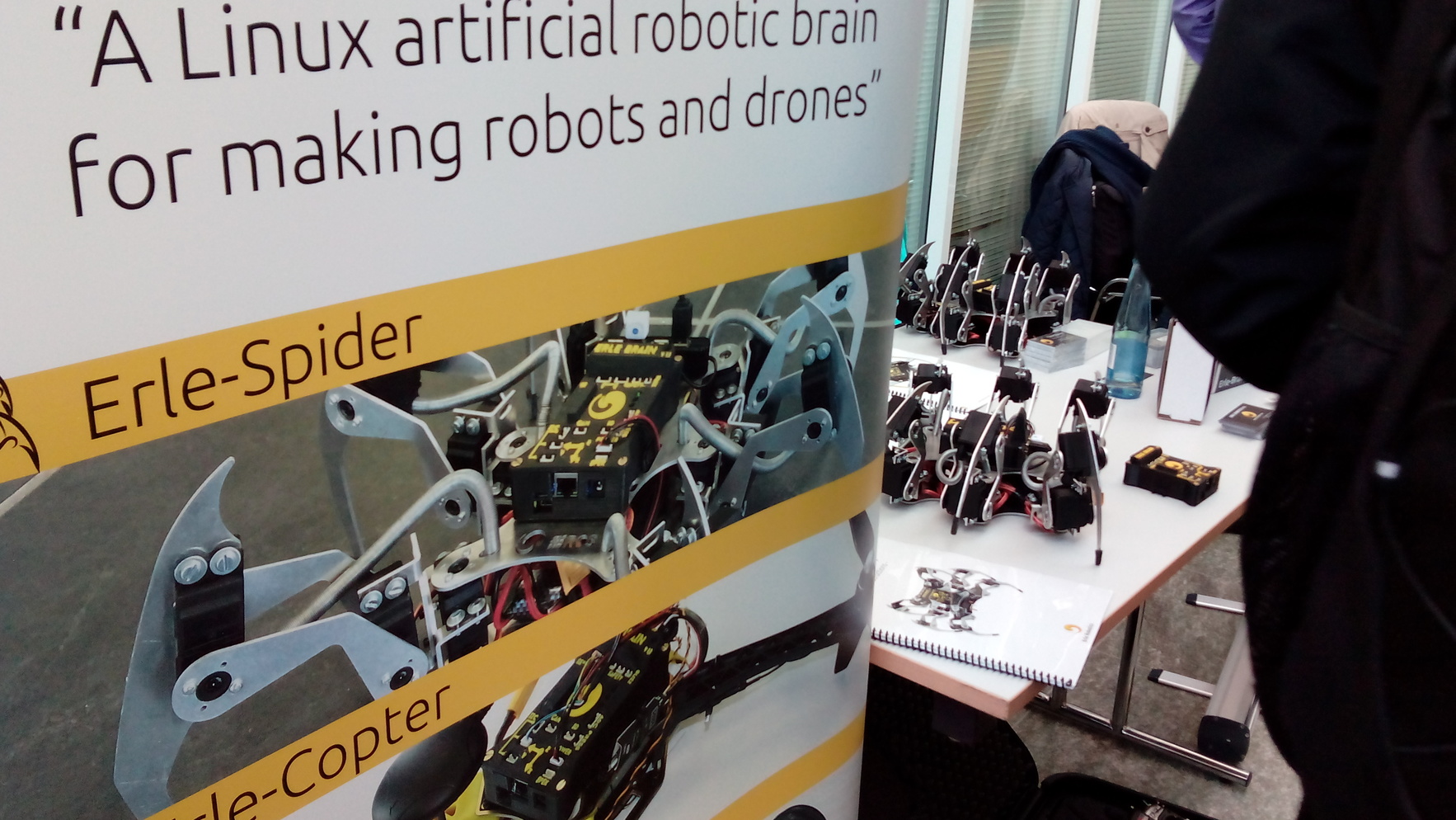
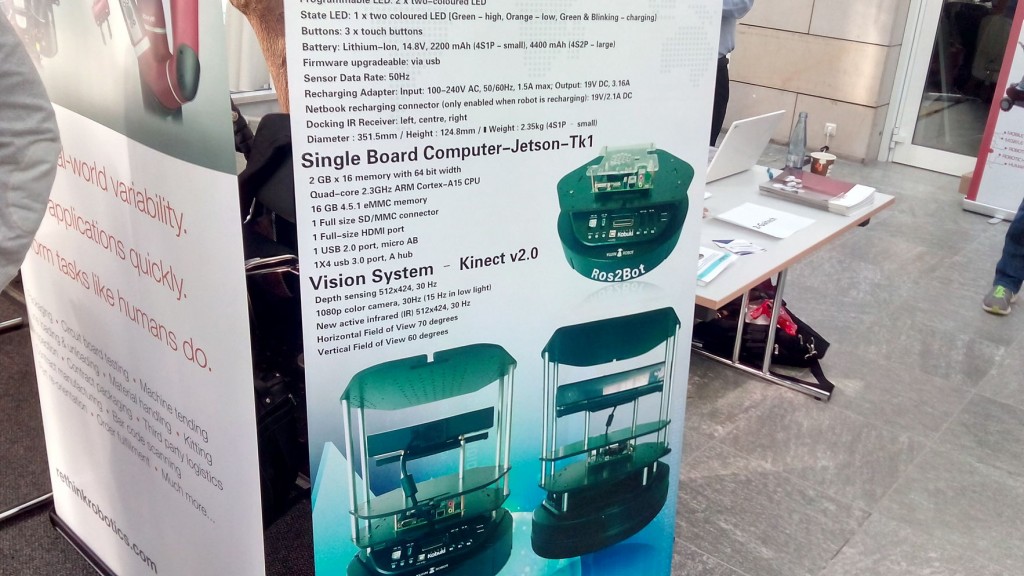
Erle Robotics bietet mit dem Erle Brain eine Raspberry ähnliche Plattform zur Kontrolle von Bots auf Ros Basis…Diverse Sensoren sind schon integriert . Das Brain gibt es als Bot in Form von Quadrokoptern, Spider Bots oder ähnlichem….mal sehen ob ich mir den Spider zu Weihnachten leisten….;-)
111

Und zum Schluss noch ein Blick auf die Schnittchen-Theke….mal was ganz anderes zu den Bastler Konferenzen, die ich sonst so besuche

Als Fazit, kann ich sagen, daß die Veranstaltung mit all den Top Entwicklern und Vorstellungen von Projekten an der Technikgrenze super interessant war.
Schön zu sehen, daß man mit ROS so viel erreichen kann und noch dabei auf eine Plattform setzt, die professionell eingesetzt wird.
Meine eigenen ROS Skills sind noch nicht so gut, da das fliessend C++ und/oder Python voraussetzt aber man braucht ja noch Projekte 😉