Arucomover
- Juli 19th Juli 2021
- Eingetragen inJavascript . NodeJs . Projects . Python . RaspBerry . Roboter . Shell
- vonVK
- Kommentar schreiben
Dieser kleine Bot ist nun fast fertig. Er kann sowohl manuell über eine Web UI gesteuert herum fahren und Aruco Codes in einem Kamera View erkennen. Auf Automatic geschaltet fährt er selbständig die Codes an. Leider hat das verwendete Chasis derart großen Spiel in der Aufhängung der DC Motoren, daß eine wirklich gerade Fahrt nicht möglich ist.
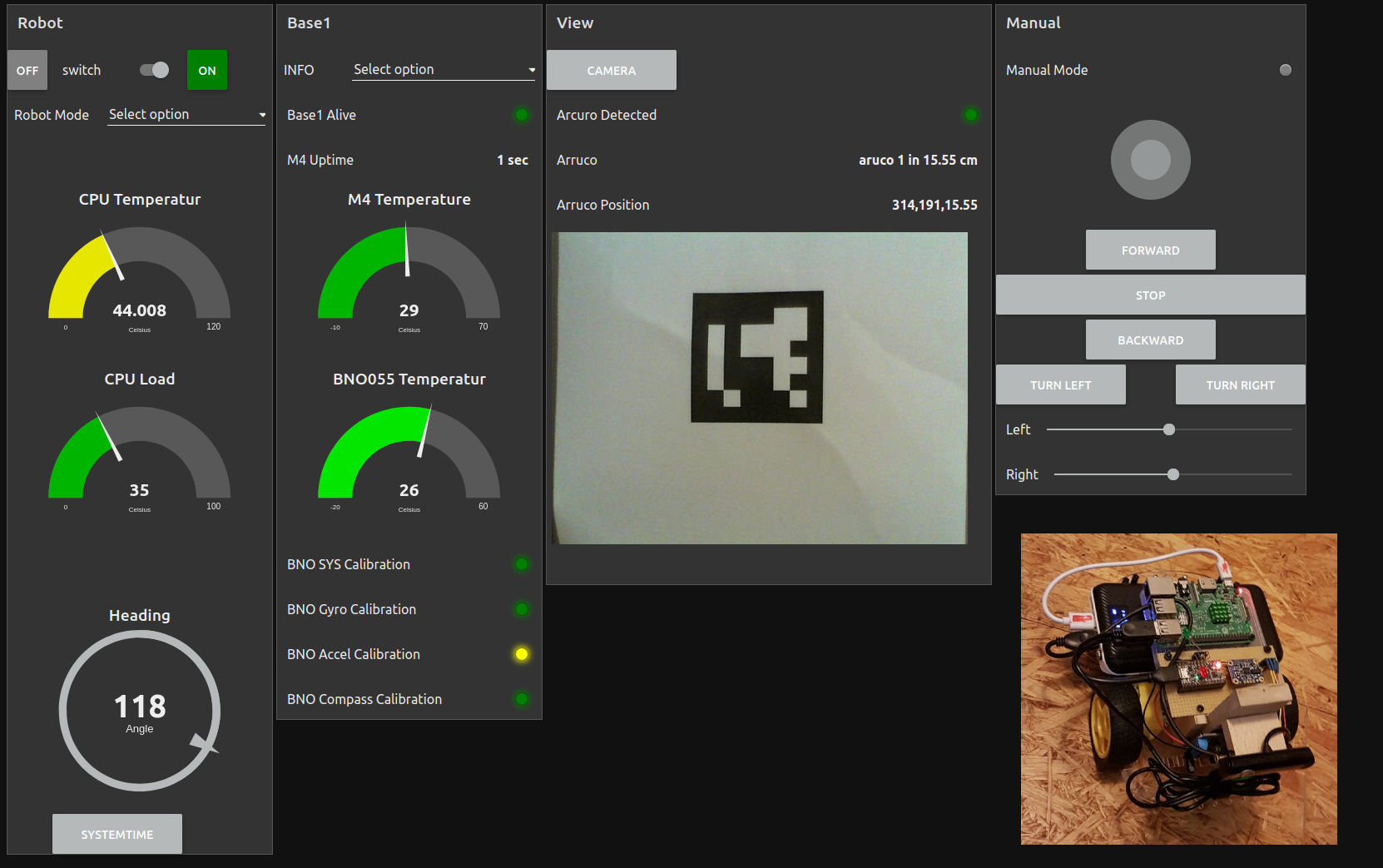
Genauer beschrieben ist er im Wiki https://www.hackerspace-ffm.de/wiki/index.php?title=Arucomover
Der Code für die Arucoerkenung und für den ItsyBitsyM4 ist in Python geschrieben.
Das Frontend und die Steuerung basieren auf Node Red und dessen Dashboard
Der Code und ein Setup für den Raspberry ist im Github Repo https://github.com/hackffm/arucomover
Keine Kommentare.